Learn troubleshooting techniques for common simulation issues.
The simulation of a model is the third phase of a three-phased process. The evaluation and
compilation phases occur first generating a structure that is used during the simulation phase
of the software. Some error-handling techniques can help with issues that may occur during
these phases.
Evaluation Errors
Uninitialized Variables
Block parameter values are defined in terms of OML
expressions. These expressions may contain OML variables.
Activate uses specific scoping rules for the evaluation
phase: In general a variable can be used in a block expression if it has been defined
in the context of a diagram containing the block, or in the initialization script.
Variables used in the diagram contexts must also be defined following the scoping
rules. Note in particular that variables defined in the OML base workspace are not systematically added to the model workspace.
If the evaluation phase finds an uninitialized variable, then the variable should be
defined in the proper context or in the initialization script. Note that all the
variables used within a masked super block must be defined within the super block,
either as a mask parameter or in a context.
If variables are used in the definition of the simulation parameters associated with
the model but not a specific diagram, then these variables must be defined in the
initialization script.
Inconsistent Parameter Types
Block parameter expressions are evaluated and checked against the type of constraints
imposed by the block. For example if a parameter accepts only a numerical matrix for
value, but the evaluation of its expression leads to a string, then an error is
generated.
Compilation Errors
The main role of the compilation phase is to find the simulation function associated with
every block, and to construct scheduling tables specifying the order in which the block
simulation functions must be called during a simulation. Common errors encountered at this
stage include algebraic loops and incompatible data types and sizes.
Algebraic Loops
An algebraic loop occurs if block activations in a model cannot be scheduled for
simulation. For example, a block A can be activated to produce its outputs only if
the values of block A’s inputs are already available from the blocks producing the
inputs by way of a feedthrough property. This scenario implies that block A must be
scheduled after the scheduling of the blocks producing the inputs. Therefore, if a
model contains a path going through the input ports of blocks containing feedthrough
properties, and the path loops back through the model, then every block in the loop
requires the value of its output to compute its output, which is of course a
contradiction. In this case no scheduling can be performed and the model is said to
have an algebraic loop. Generally, such loops do not occur in a correctly-formulated
model. If the model is sound, the presence of loops may be due to an erroneous
feedthrough property setting in a user-defined block. If the loop does occur in a
correctly-formulated model, incorporating a LoopBreaker block
into the model can break the loop.
Algebraic loops may involve activation signals. For example the output of an
integrator with a jump option is synchronized with the event causing the jump so
that the output cannot be used to define the new state of the integrator. The
problem is that the output at activation time is the value after the jump so the
output depends on the new value of the state. In general, the user intent is that
the value of the new state be computed based on the value of the output just before
the jump, and not after. A solution is to add a LastInput
block to the model. This block provides the left limit of its input signal,
therefore if the integrator output goes through this block to define the new state,
the activation at the jump time provides the desired value for the new state and the
loop is broken.
An algebraic loop can occur when a super block is made atomic. This operation may
introduce additional artificial feedthrough properties resulting in algebraic loops
in a model which was previously loop free.
Incompatible Port Data Types and Sizes
The compilation phase determines the data types and sizes of the signals that
connect blocks via regular ports. Most blocks in the software accept different data
types and sizes of signals but may impose certain constraints. The connections
impose additional constraints, in particular that the data type and size of the
connected ports be identical, with the exception that a real output port can be
connected to a complex port. A role of the compilation is to find the data types and
sizes of all the connecting signals in order to satisfy the constraints.
In some cases, the constraints imposed on the signal data types and sizes are
inconsistent and the fixed-point iteration strategy implemented by the compiler to
determine the data types and sizes fails for the following reasons:
Row or Column Vector Distinction
Signals in the software are matrices with two dimensions. A scalar signal is
a 1x1 matrix. Strictly speaking, a vector signal data type does not exist; but
a vector is often considered to be an nx1 matrix, such as a column vector.
Using a row vector instead of a column vector can raise size inconsistency
errors in some blocks.
Data Type Propagation
Most blocks impose their inputs and outputs to have similar data types. For
example the Sum block accepts all Activate data
types (real, complex, various integers) but all inputs and the output must
have the same data type. For this reason, the data type often gets propagated
throughout a model. If signals of different data types are required in a
model, then the adding of a DatatypeConversion block may be required to
explicitly perform the casting from one data type to another.
Imposing Data Type and Size Constraints on New Blocks
When creating a new block, a custom block or a library block, allowing inputs
and outputs of different data types and sizes is useful, if possible. A
sophisticated mechanism is in play to specify general constraints on port data
types and sizes, but in most cases, constraints can be imposed by using
negative numbers to specify an unknown size or data type. For example if the
size of an input is defined as [-1,1], then the input can have any number of
rows but only one column. If the same block has another input of size [-2,-1]
then this input has as many columns as the first input had rows and any number
of rows. Thus, a negative value used in the definition of a port size implies
a free value, but the same negative value used in the definition of another
port size of the same block implies that the two sizes have the same value.
The same applies to data types.
Simulation Performance
Simulation performance generally depends on the model complexity and required precision
of the simulation. In some cases, however, the simulation time may be significantly
reduced by bringing small modifications to the model.
Use of OML Custom Blocks
OML custom blocks provide options to define block
simulation behavior with OML. OML programs are easy to develop and debug, moreover they
enable access to all of the functions available in OML
libraries. But OML is an interpreted language and its
performance is significantly poorer than compiled languages such as C. As a result,
continuously activated OML custom blocks can
significantly reduce simulation performance.
If simulation time becomes an issue, OML blocks should
be replaced with Activate basic blocks, in particular
Math and Matrix Expression blocks, or the C custom block. OML custom blocks that are only activated at discrete times
usually do not degrade significantly the performance of models that include
continuous-time dynamics.
Zero Crossings
Variable-step solvers modify their steps-sizes during simulation. To satisfy the
imposed error tolerances, the solvers take smaller steps when required, but go back
to taking larger steps when possible reducing the simulation time. The fundamental
assumption when using a variable step solver is that the dynamical system being
solved is smooth, in general at least twice differentiable.
If the model being simulated is not smooth, which is generally true with hybrid
systems, then the time interval must be divided into distinct intervals such that
over each interval a smooth dynamical system is exposed to the numerical solver. If
not, the solver may have to reduce significantly its step-size to go beyond a
non-smooth point; it may even fail.
The software includes a sophisticated mechanism for implementing this strategy
based on distinguishing critical events from non-critical events. Critical events
are used to specify max step-sizes and cold-restart actions during the
simulation.
The software’s compiler and simulator identify and manage most critical events, but
when a non-smooth source is inside of a block, then that source must be exposed by
the block itself. This is done in particular by declaring zero-crossing surfaces.
Most non-smooth blocks in the installed library declare zero-crossings, but they
also provide the option to turn off zero-crossings. Particular situations can occur
where using a zero-crossing mechanism creates out of range signals causing solver
failure. In such situations, the zero-crossing option of a block must be turned off;
otherwise zero-crossing options must be turned on for all blocks to achieve good
simulation performance.
For the same reason, all user-defined blocks containing non-smooth dynamics, Custom
blocks or not, must implement a zero-crossing surface if they are to be activated in
continuous-time.
Solver Choice
The software provides a number of numerical solvers. Some solvers may be better
adapted to some models. There is no simple rule for choosing the right solver but in
general a variable-step solver should be used if possible, unless there is a
specific reason for using a fixed-step solver. If the variable-step solver fails or
is too slow, even after relaxing error tolerances, something that happens in general
when the model contains hidden non-smoothness, then fixed-step solvers can be used.
The choice of the step size should be made appropriately. Note that fixed-step
solvers do not have any error control mechanism.
Sliding Mode
Hybrid systems can switch from one dynamics to another during simulation. In some
cases the time differences from one switching to the next may go to zero (Zeno
behavior) with the solution converging to a surface. It is possible to reformulate
the dynamics of the system to obtain its behavior constrained to this sliding
surface. The dynamics is then said to be in sliding mode. But such a transformation
cannot be done by a general purpose solver such as Activate. If the sliding surfaces are declared properly with
zero-crossings then the solver stops and restarts at each switching time, assuming a
variable-step solver is used, and so the simulation ends up freezing at some point.
If the sliding surface is not implemented with zero-crossings, the simulation may
proceed slowly and the solution exhibits high frequency chattering. This may provide
an acceptable approximate solution to the original model with sliding mode. Using a
fixed-step solver may be an alternative in this case. But in most cases, if the
sliding mode is really present in the model and is not the result of a modeling
error, then modifications to the model should be considered. This may include
introducing additional dynamics, hysteresis or explicit time delays to reduce the
chattering. Such behaviors generally better represent the actual dynamics of control
models where a sliding mode is encountered.
Scope and Display Blocks
Excessive use of Scope and Display blocks can slow down a simulation. A large
number of such blocks can be present in a model for debugging purposes, but only a
few are truly needed for a given simulation run. To improve simulation time, you can
turn off the status for some of these blocks. Turning off the status removes the
blocks from the simulation structure and changes the simulation performance to be
identical to that of having completely removed the blocks.
Real Time Scaling
The model parameter for Real Time Scaling slows down a simulation so that it can
run in real time. A slow simulation may happen if this parameter is not set
correctly. Setting the parameter value to zero makes the simulation run as fast as
possible.
Profiling
When defining the simulation parameters for your model, choosing the option to
Create a debug file also generates a .csv file
(<modelname>_profile.csv) which contains valuable profiling
information that you can use to analyze your simulation.
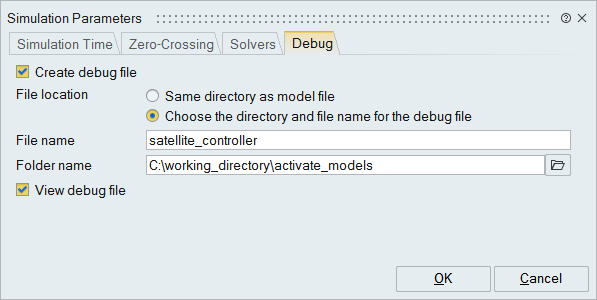
To create the profile and debug files, from the Simulate tool group, select
Simulation Parameters.
On the Debug tab, select Create debug file, enter a name
and location for the debug file, and then click OK.
When you run a simulation, in addition to the debug file, a profiling file,
<modelname>_profile.csv, is generated and stored in the
temporary directory (tempdir) for the model.
Note: The tempdir is displayed in the
OML Command window when you run a simulation. You can query the location of the
directory with the command:
GetCurrentModelTempDir.
The profiling file includes
the execution time of each block and the number of times and conditions (flags)
under which the block is called during the simulation. The information is displayed
in columns for each block and provides the number of times a block is called for
each flag. The flags are defined as follows:
Flag Number Issued
Flag Definition
Flag 0
VssFlag_Derivatives
Flag 1
VssFlag_OutputUpdate
Flag 2
VssFlag_StateUpdate
Flag 3
VssFlag_EventScheduling
Flag 4
VssFlag_Initialize
Flag 5
VssFlag_Terminate
Flag 6
VssFlag_Reinitialize
Flag 7
VssFlag_ReinitializeImplicit
Flag 8
VssFlag_Projection
Flag 9
VssFlag_ZeroCrossings
Flag 10
VssFlag_Jacobians
Flag 11
VssFlag_GotoPause
Flag 12
VssFlag_ReturnFromPause
Simulation Failures
Singularity in a Block
If a block simulation function performs a computation with inputs that are out of
range, for example, by a division by zero, then an error is generated. The
acceptable operations may depend on the supported data types. For example, the Log
block does not accept negative real inputs because its output is defined to be real;
the Log block does accept negative inputs of a complex data type.
Note: Singularity problems may be encountered at the start of a simulation when all
the block outputs by default are set to zero.
Frozen Simulation
The presence of sliding mode may cause slow simulation but in some cases may halt
the simulation or generate an error. See Sliding Mode for more details.
Non-Convergence
The non-convergence of a solver is in general due to the presence of an unstable
mode in the model. The divergence may occur very rapidly but in general can be
confirmed by adding Scope blocks to the model for visualizing the values of the
states. Another possible reason for non-convergence is the presence of hidden
non-smoothness.
Error Messages
Unsupported Visual C++ Target Option
During some use cases, for example, simulation of Modelica models or FMI import or
export, the software issues an error if unable to detect a C++ compiler installed on
the system. To correct the error, install a supported Microsoft Visual Studio C++
compiler. To view the compiler installed on your system, from the OML command window, enter
vssGetCompilerName().