Global Domains and Handles
Each global domain is associated with any number of global handles. Global handles will only influence the nodes contained within their associated global domains. Global domains and handles are best for making large scale shape changes to the model.
Global domains are represented by a cube made up of dashed lines, and located at the centroid of the nodes which make up the global domain.
Global handles are the largest handles in the model. Handles are colored red if they are
not dependent on other handles, and they are colored yellow, cyan, or violet if they are
dependent on other handles. The handle color indicates their level of dependency. Dependent
global handles are also smaller than the handles on which they are dependent. The base size
of all the handles in the model can be set on the morphing Visualization Controls tab
accessed by using the Visualization options (![]() ) on the Visualization toolbar. The
size given is used as the radius for the independent global handles. You cannot edit the
color of the handles nor the relative size between the dependent and independent handles.
However, you can edit the color of the domains in the morphing Visualization Controls
tab.
) on the Visualization toolbar. The
size given is used as the radius for the independent global handles. You cannot edit the
color of the handles nor the relative size between the dependent and independent handles.
However, you can edit the color of the domains in the morphing Visualization Controls
tab.
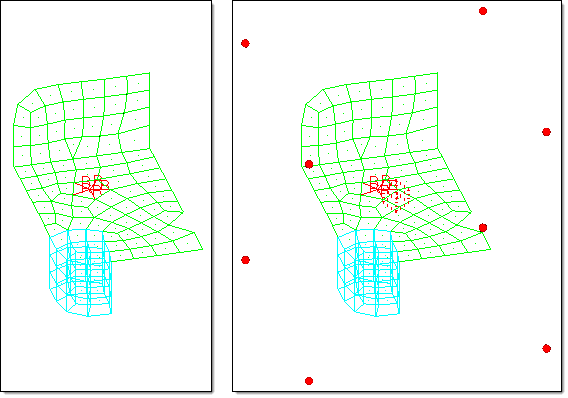
Figure 1. Global Domain and Global Handles. Eight handles are placed at the corners of a box enclosing the model. By moving the handles you can stretch or deform the model along all three axes.
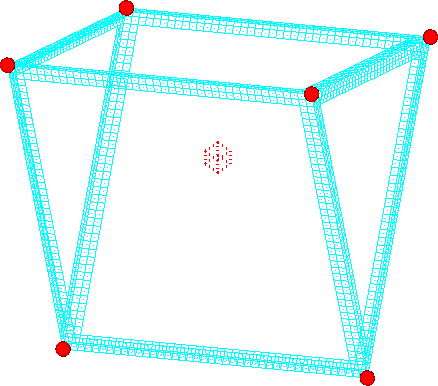
Figure 2. Space Frame with Six Manually Created Global Handles. When the handles are moved, the space frame morphs in a way such that the bars run between the handles.
- Hierarchical
- Global handles influence the local handles found at nodes inside the global domain, which in turn influence nodes within the local domains.
- Direct (default)
- Global handles influence the nodes in the model directly even if the nodes are not in a local domain.
- Mixed
- Global handles will influence every node inside the global domain using the hierarchical method if the node is inside a local domain, or the direct method if the node is not in a local domain.
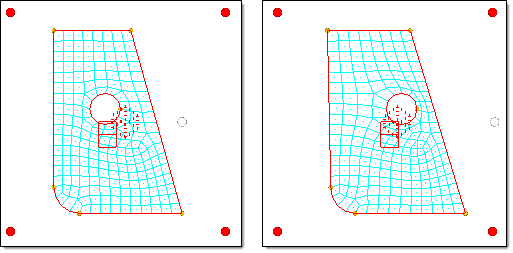
Figure 3. Global Morphing using the Hierarchical Method. When the highlighted (white) handle is moved to the right, it moves the local handles, which move the mesh. Note how the straight edge remains straight and the circle remains round.
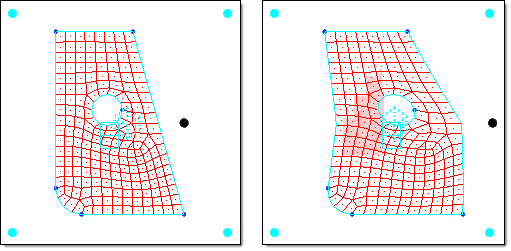
Figure 4. Global Morphing using the Direct Method. When the highlighted (white) handle is moved to the right, the mesh is affected directly. Note the resulting distortion of the edge and circle.
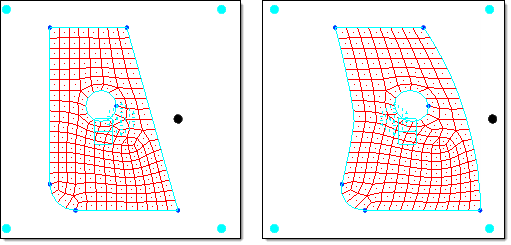
Figure 5. Global Morphing using the Direct Method and Biasing Factors. By increasing the biasing factor for the highlighted (white) handle, the angular shape of the morph becomes rounded.
The influences between the global handles and local handles using the hierarchical method or nodes using the direct method can be calculated using either the spatial method or the geometric method. Both methods attempt to determine how a global handle affects nodes or local handles in the space surrounding it. The spatial method is the default, and is the fastest and most robust method for generating global influences based on a spatial formulation for the entire model. The geometric method can be slow for large models or large numbers of global handles, but may produce more desirable influences. The geometric method is the method that was originally used in HyperMesh and generates influences based on the geometric relationship between a given node or local handle and the surrounding global handles. The method used can be selected in the global subpanel of the Morph Options panel.