Isotropic, kinematic or uncoupled spring hardening options can be defined by the
hardening flag H.
These examples only include the spring stiffness without any damping.
Linear Elastic Spring, H=0
A linear spring can be modeled by inputting only the linear stiffness as Ki and
fct_ID1i
=fct_ID4i =0. For linear
spring, H is always 0.
Figure 1. Linear Elastic Spring. with H=0
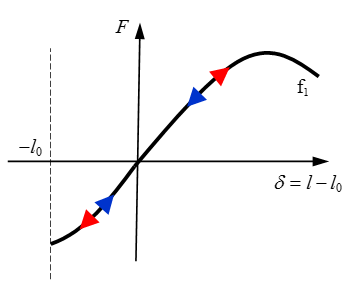
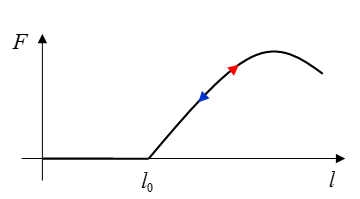
Nonlinear Elastic Spring, H=0
A nonlinear elastic spring is modeled by defining a force versus displacement curve
where f1 in Figure 2 is defined in
fct_ID1i. Since the model
is elastic, the loading and unloading follow the same path.
Figure 2. Nonlinear Elastic Spring. with H=0
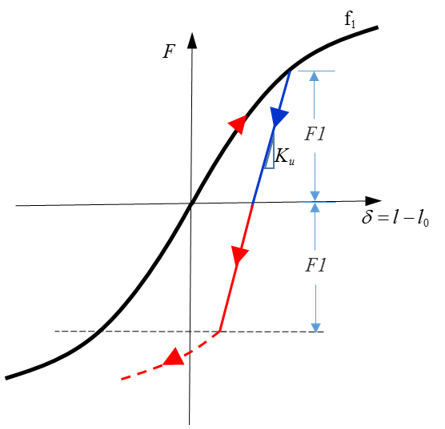
Nonlinear Elastic Plastic Spring with Isotropic Hardening, H=1
Figure 3 shows the behavior of a nonlinear elastic plastic spring with
isotropic hardening where f1 is defined in
fct_ID1i and unloading
stiffness Ku is input using Ki.
Figure 3. Isotropic Hardening. with H=1
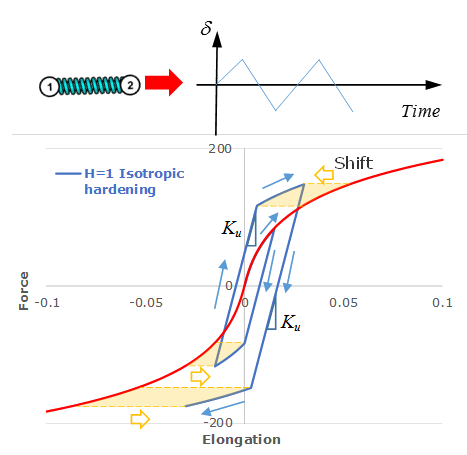
To demonstrate istropic hardening, H=1, Figure 4 shows a spring loaded in tension and then
unloads using the linear unloading stiffness, Ku. The unloading stiffness continues to be used in
compressive loading until the loading force in compression matches the maximum
loading force in tension. From this point, any additional compressive loading uses
the input loading function.
Figure 4. Cyclic Loading Applied on a Spring. with H=1
Nonlinear Elastic Plastic Spring with Uncoupled Hardening, H=2
The force versus displacement curve f1 in Figure 5 is defined in
fct_ID1i and unloading
stiffness Ku is input using Ki. When uncoupled harding H=2, is used, the tensile and compression behavior are
uncoupled. Thus, once the unloading reaches zero force, there is no stiffness until
zero displacement and then the compressive loading follows the force displacement
curve.
Figure 5. Isotropic Hardening. with H=2
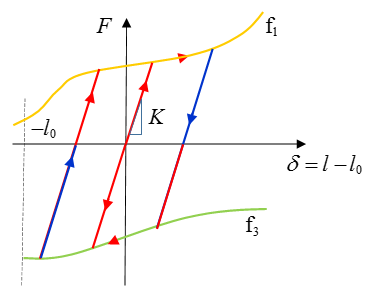
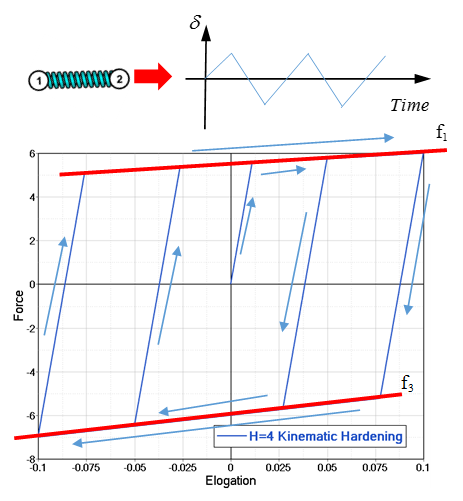
Nonlinear Elastic Plastic Spring with Kinematic Hardening, H=4
When H=4 is used, the loading function
fct_ID1i and unloading
fct_ID3i are mandatory and
shown in Figure 6as f1 and f3. The loading curve should be positive for all values
of abscissa. The unloading curve in this case should be negative for all values of
abscissa. These curves represents upper and lower limits of yield force as function
of current spring length variation or strain. The force follows K between function f1 and f3 and is input as Ki.
Figure 6. Kinematic Hardening. with H=4
Figure 7. Cyclic Loading Applied on a Spring. with Kinematic Hardening H=4
If the minimum and maximum yield curves (f1 and f3) have identical shapes, the hardening is considered
to be kinematic.
Figure 8. H=4, with the Minimum and Maximum Yield
Curves. (f1 and f3) input with identical shapes
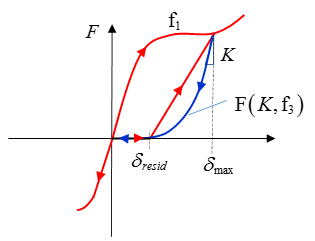
Nonlinear Elastic Plastic Spring Nonlinear Unloading, H=5
When H=5, uncoupled hardening in compression and tensile
with nonlinear unloading is modeled.
Function f3 defines the residual displacement δresid related to displacement; where the unloading starts
at δpeak. The unloading is defined by: (1)
F(K,f3)=α(δ−δresid)n
with, δresid=f3(δpeak)
Where, α and n being computed using K and f3(δpeak). The loading function f1 in Figure 9 is defined in
fct_ID1i and residual
deformation function f3 input as
fct_ID3i.
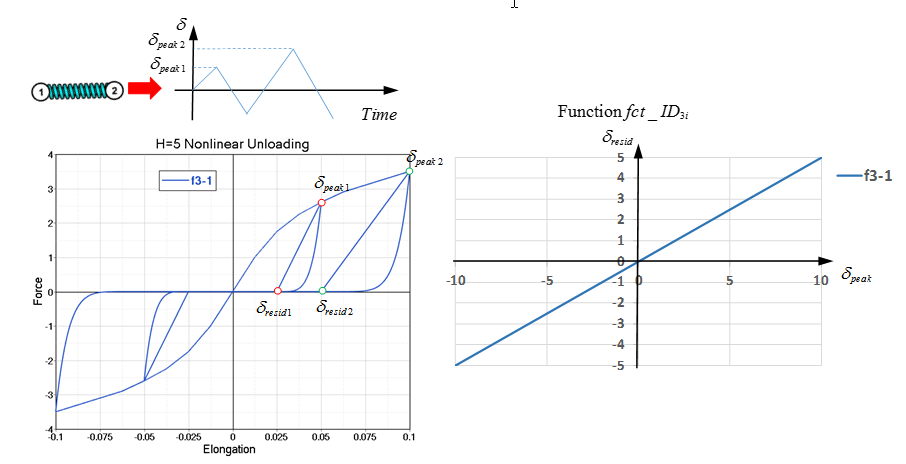
Figure 9. Nonlinear Unloading. with H=5
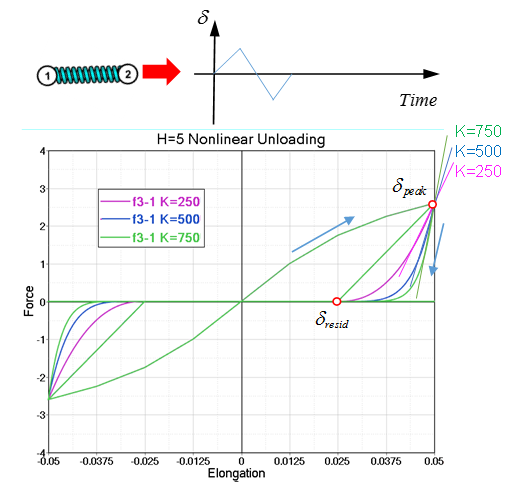
In Figure 10, a linear curve is defined for δresid and δpeak in function f3. δresid is 0.5 times δpeak. In cycle loading, the first unloading started at δpeak1=0.05 and then δresid=0.5×0.05=0.025. The second unloading started at δpeak2=0.1 and then δresid=0.5×0.1=0.05.
Figure 10. Linear Residual versus Maximum Displacement Curve. with H=5
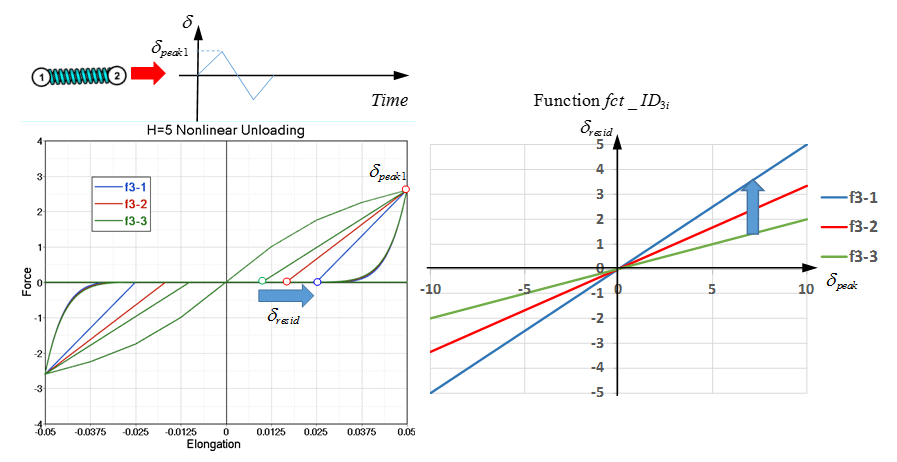
Figure 11 shows how increasing the slope of the
residual versus maximum displacement curve changes the spring behavior.
Figure 11. Different Linear Residual versus Maximum Displacement
Curves. with H=5
Comparing Figure 10 and Figure 11, shows that the function f3 only effects the residual displacement δresid and the shape of unloading curve. The shape of
unloading curve is controlled by stiffness K and δpeak (unloading start displacement).
If the same stiffness K and same
δpeak are used, then the unloading curve
has the same shape.
If the same stiffness K but different δpeak are used, then the unloading curve has a different
shape.
If a different stiffness K and same δpeak are used, then the unloading curve has a different
shape, as shown in Figure 12.
Figure 12. Different K Values. with H=5
Nonlinear Elastic Plastic Spring Istropic Hardening and Nonlinear Unloading, H=6
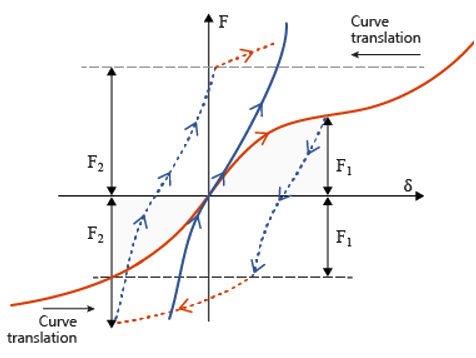
Both H=1 and H=6 represent isotropic hardening. In H=6, a nonlinear unloading with function f3 is used while H=1 uses a constant Ku for linear unloading. When the spring is loaded in
tension and then unloads, it follows the defined unloading curve. The unloading
curve continues to be used in compressive loading until the loading force in
compression matches the maximum loading force in tension. From this point,
additional compressive loading uses the input loading function. The loading curve in f1 is defined using
fct_ID1i and unloading
curve in f3 is defined using
fct_ID3i.
Figure 13. Istropic Hardening and Nonlinear Unloading. with H=6
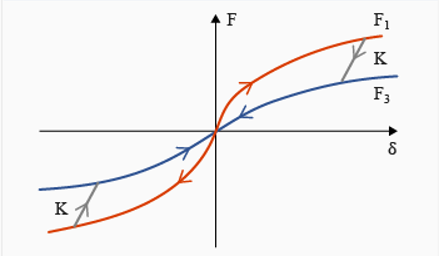
Nonlinear Elastic Plastic Spring Elastic Hysteresis, H=7
With H=7, the spring unloading is initially linear using
the input K value until it reach the unloading curve f3. Additional unloading follows f3. If reloading occurs, the stiffness K is used to reach the curve f1, which is then followed. The curve f3 must have ordinates smaller than curve f1 at a defined abscissa value. The loading curve in f1 is defined using
fct_ID1i and unloading
curve in f3 is defined using
fct_ID3i.
Figure 14. Nonlinear Elastic Plastic Spring Elastic Hysteresis. with H=7
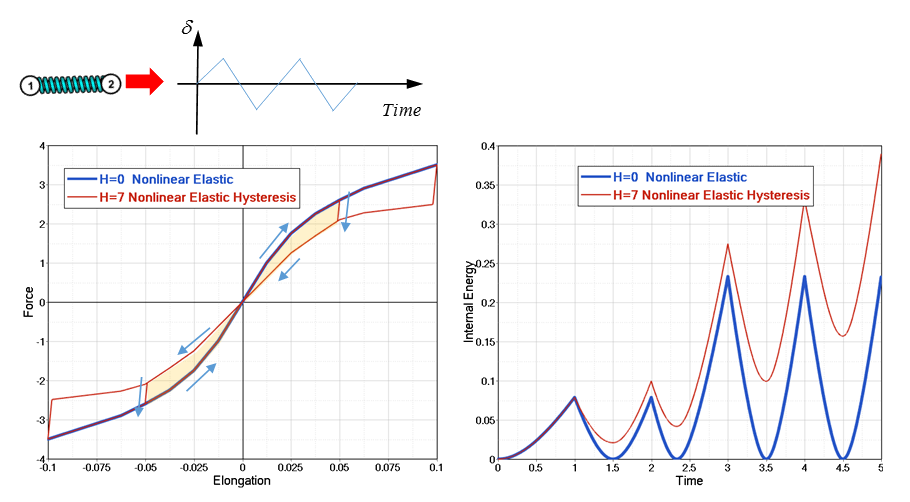
A spring with H=7 could be used to describe hysteresis behavior.
Figure 15 shows the difference between H=0 and H=7 under cycle loading. With H=0 (blue curve), it is nonlinear elastic. But with H=7 (red curve), more energy (yellow area in first
loop) is absorbed, due to the hysteresis loop.
Figure 15. Comparison of Nonlinear Elastic with Hysteresis H=7. and Nonlinear Elastic H=0
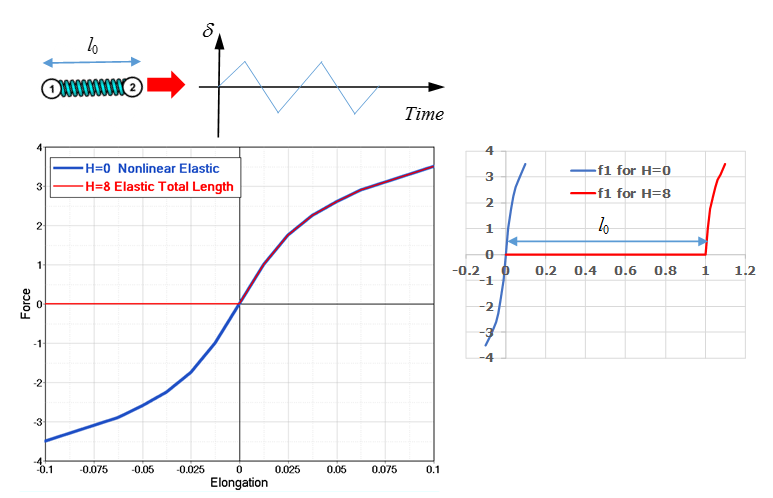
Nonlinear Elastic Total Length Function, H=8
The elastic total length spring H=8 is only available in
/PROP/TYPE4. Unlike the other hardening options which use the
change in spring length, this spring uses the total spring length when defining the
spring stiffness. No stiffness occurs in compression. Input
fct_ID1i to define the force
versus total spring length.
Figure 16. Nonlinear Elastic Total Length Function. with H=8
Figure 17. Comparison of H=0 . and H=8 with Cyclic Loading Applied
Dashpot
A dashpot (damper) can be modeled by not defining any spring stiffness. Thus, with
the first term in Equation 1 removed, the force becomes only a function of the
constant damping coefficient Ci or a nonlinear force versus velocity damping
function h as
fct_ID4.(2)
Fi(δi)=Ci˙δi+Hscaleih(˙δiFi)
Figure 18.
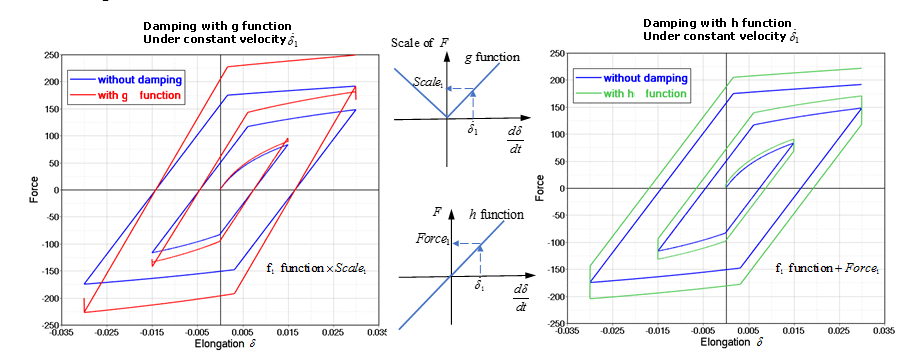
Damping Using a Function
Remembering that the g function scales the force are f1⋅g, whereas the h function adds to the force f1+h. Figure 19 compares these two different
methods.
A cyclic loading is applied to a nonlinear elastic plastic spring (H=1) and in two models one which uses the g function to scale the force and the other uses the h function to add to the force.
Figure 19.
Note: The function h should have thesame sign as velocity, but the
function g should be always positive, due to it is a
multiplier to force displacement curve f1.
Inconsistent Stiffness
When creating a spring property with a user-defined curve "Force vs Displacement" for the
stiffness, typically the end of the curve has a very high slope to deal with very
high compression. In this case, the following warning is often received with
Radioss
Starter.
WARNING ID: 506
** WARNING IN SPRING PROPERTY
** WARNING IN SPRING PROPERTY SET ID=XXX
STIFFNESS VALUE 100 IS NOT CONSISTENT WITH THE MAXIMUM SLOPE (4550)
OF THE YIELD FUNCTION ID=X
THE STIFFNESS VALUE IS CHANGED TO 1000
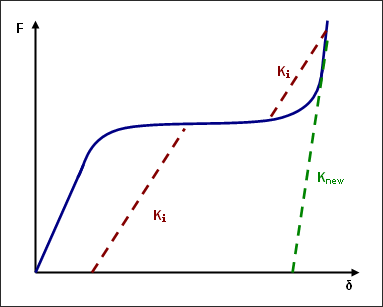
This warning comes from the fact that the slope of the input curve (the stiffness) is not
consistent with the initial stiffness. If the maximum slope of the curve (the
maximum stiffness) is greater than the initial stiffness, unloading in the zone of
maximum slope will be false (Figure 1). To obtain proper behavior, Radioss Starter modifies
the initial stiffness according to the maximum slope.