Three coordinate systems are introduced in the formulation:
Global Cartesian fixed system X=(X→i+Y→j+Z→k)
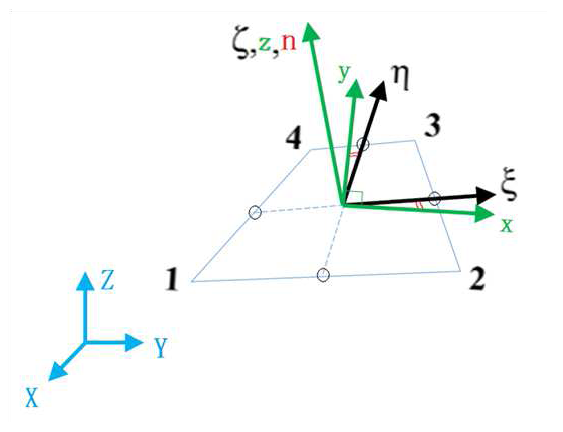
Natural system (ξ,η,ζ), covariant axes x,y
Local systems (x, y, z) defined by an orthogonal set of unit base vectors (t1, t2, n). n is taken to be normal to the mid-surface coinciding with ζ, and (t1, t2) are taken in the tangent plane of the mid-surface.
Figure 1. Local Reference Frame
The vector normal to the plane of the element at the mid point is defined
as:(1)
n=x×y‖x×y‖
The vector defining the local direction is:(2)
t1=x‖x‖
Hence, the vector defining the local direction is found from the cross product of the two
previous vectors:(3)