Predefined Paths
CONSTANT RADIUS
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'CONSTANT_RADIUS'
RADIUS = 40
INITIAL_STRAIGHT = 10
ENTRY_ANGLE = 0.39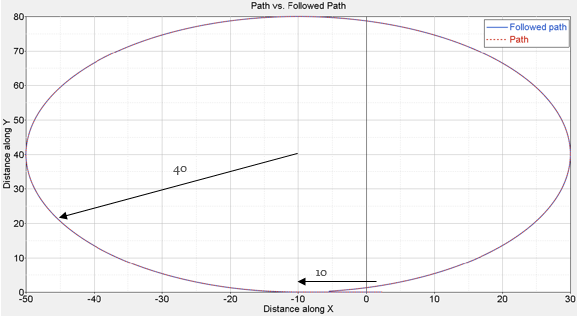
| [CONSTANT RADIUS] | ||
|---|---|---|
| TYPE | Attr - string | REQUIRED <CONSTANT_RADIUS> |
| RADIUS | Attr - real | REQUIRED Radius of the circle. |
| INITIAL_STRAIGHT | Attr - real | REQUIRED Length of the initial straight before entering the turn. |
| TURN | Attr - string | OPTIONAL
|
| ENTRY_ANGLE | Attr - real | OPTIONAL If provided, a transient length is added after the straight where the curvature is increased linearly to the final curvature before entering the constant radius path. Entry angle defines the angle with respect to the straight section at which the vehicle enters into the Constant Radius path. The greater the entry angle, the longer the transient section. |
SLALOM
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'SLALOM'
NUMBER_OF_CONES = 3
DESIRED_CG_LATERAL_DISP = 3
CONE_SPACING = 50
RECOVERY_LENGTH = 20
INITIAL_STRAIGHT = 20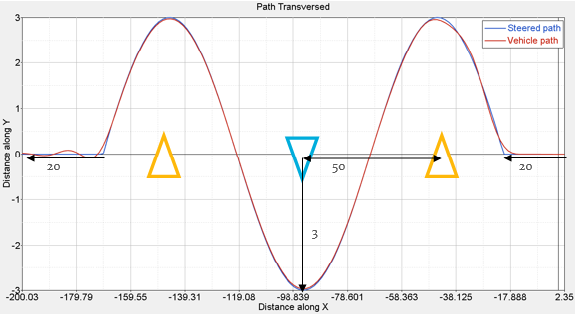
| [SLALOM] | ||
|---|---|---|
| TYPE | Attr - String | REQUIRED <SLALOM> |
| NUMBER_OF_CONES | Attr - int | REQUIRED Number of cones. |
| DESIRED_CG_LATERAL_DISP | Attr - real | REQUIRED Desired CG lateral displacement. |
| CONE_SPACING | Attr - real | REQUIRED Distance between adjacent cones. |
| INITIAL_STRAIGHT | Attr - real | REQUIRED Straight section before entering slalom. |
| RECOVERY_LENGTH | Attr - real | REQUIRED Straight section after completing slalom. |
| ATTACK_DIRECTION | Attr - String | OPTIONAL
|
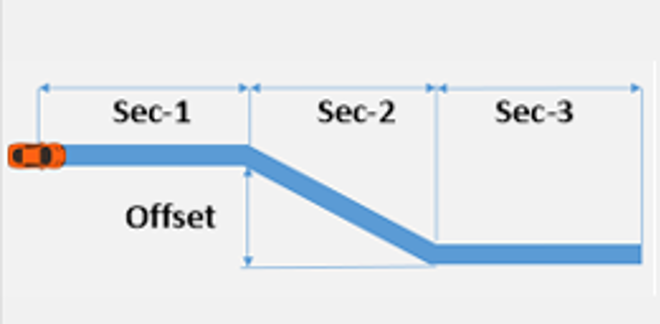
SINGLE LANE CHANGE
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = 'PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'SLC'
LATERAL_OFFSET = 3
SECTION_1 = 20
SECTION_2 = 20
SECTION_3 = 50
TURN_DIRECTION = 'LEFT'
ENTRY_ANGLE = 0.04963
MAX_CURVATURE = 1.42857e-02
| [SINGLE LANE CHANGE] | ||
|---|---|---|
| TYPE | Attr - String | REQUIRED <SLC> |
| LATERAL_OFFSET | Attr - int | REQUIRED Lateral distance between two lanes. |
| SECTION_1 | Attr - real | REQUIRED First lane distance in longitudinal direction. |
| SECTION_2 | Attr - real | REQUIRED Distance between lanes in longitudinal direction. |
| SECTION_3 | Attr - real | REQUIRED Second lane distance in longitudinal direction. |
| TURN_DIRECTION | Attr - real | OPTIONAL
|
| ENTRY_ANGLE | Attr - real | OPTIONAL If provided, it enables path easements around the lane corners. ENTRY_ANGLE is the angle with respect to straight lane section at which path easement section goes to maximum curvature and continues before reducing the curvature to zero on next lane. Used for first and second lane corners. |
| MAX_CURVATURE | Attr - real | OPTIONAL If provided, it enables path easements around the lane corners. MAX_CURVATURE is the maximum curvature of the path easement section at the lane corners. Used for first and second lane corners. |
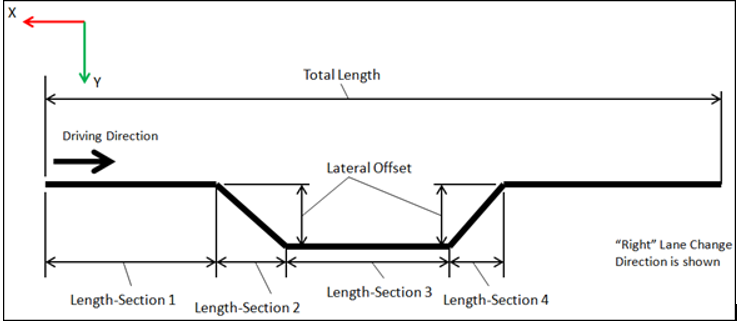
DOUBLE LANE CHANGE
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'DLC'
SECTION_1 = 20
SECTION_2 = 20
SECTION_3 = 20
SECTION_4 = 20
SECTION_5 = 50
TURN_DIRECTION = 'LEFT'
ENTRY_ANGLE_1 = 0.04963
MAX_CURVATURE_1 = 1.42857e-02
ENTRY_ANGLE_2 = 0.04963
MAX_CURVATURE_2 = 1.42857e-02
| [DOUBLE LANE CHANGE] | ||
|---|---|---|
| TYPE | Attr - String | REQUIRED <DLC> |
| LATERAL_OFFSET | Attr - int | REQUIRED Lateral distance between two lanes. |
| SECTION_1 | Attr - real | REQUIRED First lane distance in longitudinal direction. |
| SECTION_2 | Attr - real | REQUIRED Distance between first and second lane in longitudinal direction. |
| SECTION_3 | Attr - real | REQUIRED Second lane distance in longitudinal direction. |
| SECTION_4 | Attr - real | REQUIRED Distance between second and third lane in longitudinal direction. |
| SECTION_5 | Attr - real | REQUIRED Third lane distance in longitudinal direction. |
| TURN_DIRECTION | Attr - real | OPTIONAL
|
| ENTRY_ANGLE_1 | Attr - real | OPTIONAL If provided, it enables path easements around the lane corners. ENTRY_ANGLE_1 is the angle with respect to straight lane section at which the path easement section goes to maximum curvature and continues before reducing the curvature to zero on next lane. Used for first and second lane corners. |
| MAX_CURVATURE_1 | Attr - real | OPTIONAL If provided, it enables path easements around the lane corners. MAX_CURVATURE_1 is the maximum curvature of the path easement section at the lane corners. Used for first and second lane corners. |
| ENTRY_ANGLE_2 | Attr - real | OPTIONAL If provided, it enables path easements around the lane corners. ENTRY_ANGLE_2 is the angle with respect to straight lane section at which the path easement section goes to maximum curvature and continues before reducing the curvature to zero on next lane. Used for third and fourth lane corners. |
| MAX_CURVATURE_2 | Attr - real | OPTIONAL If provided, it enables path easements around the lane corners. MAX_CURVATURE_2 is the maximum curvature of the path easement section at the lane corners. Used for third and fourth lane corners. |