Define Rigid Body Motion
Use the Rigid Body tool to simulate the dynamic motion of a body under the influence of forces and moments.
To represent rigid body motion, you need to define:
- A local coordinate system
- External forces and moment
- Internal fluid traction and moment
-
From the Motion ribbon, Direct tools, click the Rigid Body tool.
Figure 1.

-
Define translational motion and stiffness/damping effects.
-
Click the translation arrow on the triad widget in either of the three
direction.
Figure 2.
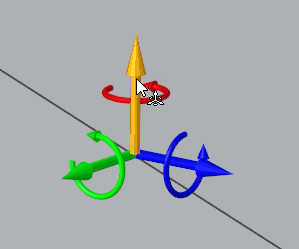
-
Click the translation arrow on the triad widget in either of the three
direction.
-
Define rotational motion and stiffness/damping effects.
-
Click the rotation arrow on the triad widget in either of the three
direction.
Figure 3.
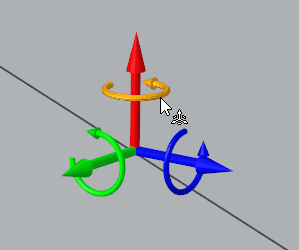
-
Click the rotation arrow on the triad widget in either of the three
direction.
-
From the guide bar, execute the command in the following
ways:
- Click
 to confirm your selection and remain
in the tool.
to confirm your selection and remain
in the tool.This allows you to continue creating instances and helps you visualize and edit instances with the legend.
- Click
 to confirm your selection and exit the
tool.
to confirm your selection and exit the
tool.
- Click