MV-1030: Create a System Definition Using the MotionView
GUI
In this tutorial you will learn how to create systems using the MotionView graphic user interface, export a system definition to a
file, and instantiate a saved definition in a model.
In the earlier exercise, you learned about MDL and authoring a
definition using the MDL language through a text editor. In general, many of the
definitions (such as systems, datasets, and analyses) are created using the MotionView graphical user interface. This tutorial provides you
with an alternate method to using the text editor.
Create a System Instance
In this step, you will create a system instance.
Open the Add System/Assembly dialog in one of the
following ways:
In the Project Browser, right-click on
Model and select Add > System/Assembly.
On the Container Entity toolbar, right-click the (System/Assembly panel) button.
In the dialog, click the System radio button.
In the Add System dialog, specify the Variable as
sys_pendu, the Label as
Pendulum, and the Definition Name as
def_sys_pendu.
Click OK.
This will add the Pendulum system to the model and display the system's
panel.
Add Attachments to the System
In this step you will create two attachments for the Pendulum system.
From the Attachments tab, click on the Add button.
In the dialog, specify the Label as Attachment Point and
the Variable as arg_p. Verify that Type is set to
Single only.
From the drop-down menu, select Point.
Click OK.
Use steps 1
through 4 to
create a second attachment.
Specify the Label as Attachment Body and the
Variable as arg_b.
From the drop-down menu, select Body.
Figure 1.
Note: These attachments will be used to attach this system to other
model entities. Notice that both are currently Unresolved, meaning
they are not yet referring to another entity in the model.
Double-click the collector.
In the Select a Point dialog, click Global Origin.
Figure 2.
Click OK.
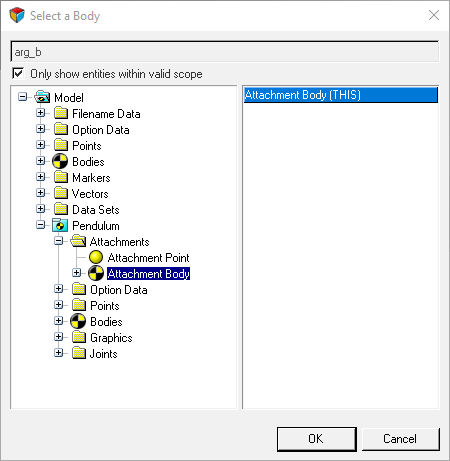
Double-click the collector.
In the dialog, click Ground Body.
Click OK.
Add a Point to the System
In this step you will add a point to the Pendulum system.
In the Project Browser, click
Pendulum.
Open the Add Point or PointPair dialog in one of the
following ways:
Right-click on Pendulum and select Add > Reference Entity > Point.
On the Reference Entity toolbar, right-click the
(Points) icon.
In the dialog, specify the Label as Mass CG and the
Variable as p_cg. Verify that Type is set to
Single.
Figure 3.
Click OK.
From the Properties tab, click the X Coordinate field.
Then click the button.
This will display the Expression
Builder.
Delete 0.0 from the Expression area (located at the top of the dialog)
From the Model Tree, expand the
PendulumAttachmentsAttachment Point folders and select
x.
Click the Add button.
Figure 4.
The expression arg_p.x will automatically
fill the Expression area.
Add +50 to the epression.
Figure 5.
Click OK to close the
dialog.
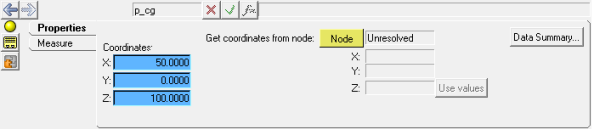
This step will parameterize Mass CG with regard to the X coordinate of the
Attachment Point. It is placed at a distance of 50 length units in the X
direction.
Repeat steps 5
through 10 for the
Y and Z coordinates.
For the Y coordinate, specify the expression as
arg_p.y.
For the Z coordinate, specify the expression as
arg_p.z+100.
Note: You can also add the Y and Z coordinate expressions by copying the
X coordinate expression and editing it.
Figure 6.
Note: the background color of the field changes for parametric
expressions.
Add a Body to the System
In this step you will add a body to the Pendulum system.
In the Project Browser, click
Pendulum.
Open the Add Body or BodyPair dialog in one of the
following ways:
Right-click on Pendulum and select Add > Reference Entity > Body.
On the Reference Entity toolbar, right-click the (Bodies) icon.
In the dialog, for Label enter Mass and for Variable
enter b_mass.
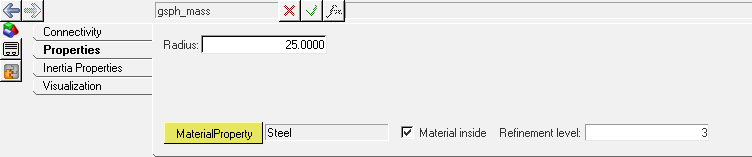
In the Properties tab, specify the Mass as 1, and the
Ixx, Iyy, and Izz Intertia properties as 1000.
Figure 7.
In the CM Coordinates tab, check the Use center of mass coordinate
system option.
Under Origin, double-click on .
In the dialog, select Mass CG and click
OK.
Figure 8.
Add Graphics to the System
In this step, you will add graphics to the Pendulum system.
In the Project Browser, click
Pendulum.
Open the Add Graphic or GraphicPair dialog in one of the
following ways:
Right-click on Pendulum and select Add > Reference Entity > Graphic.
On the Reference Entity toolbar, right-click the (Graphics) icon.
In the dialog, specify the label as Rod, the Variable as
gcyl_rod, and the Type as
Cylinder. Then click OK.
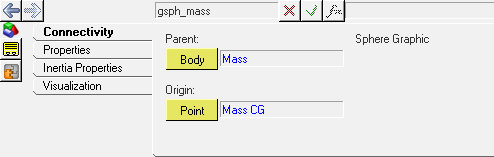
In the Graphics panel, configure the Connectivity tab.
Under Parent, double-click the collector.
In the dialog, specify the Mass body and click
OK.
Under Origin, double-click the collector.
In the dialog, specify the Mass CG point and
click OK.
Under Direction, double-click the collector.
In the dialog, specify the Attachment Point and
click OK.
Note: The Export option is only available for Systems and Analyses. For other
definitions like Datasets or Templates, the definition can be copied from
the model .mdl file.
Instantiate the System Definition
In this step you will learn how to instantiate a system definition.
In the Project Browser, select the
Model system.
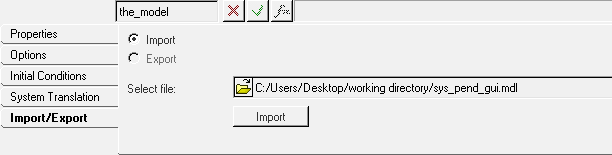
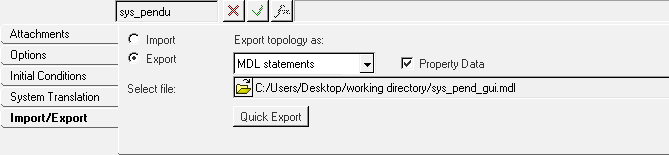
In the Systems/Assembly panel, click the Import/Export
tab.
Click the Import radio button.
Click the (file browser) and browse to your
<working directory>.
Select the sys_pend_gui.mdl file and click
Open.
Figure 15.
Click the Import button.
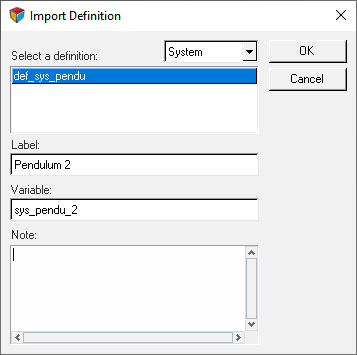
In the dialog, select def_sys_pendu.
Change the Label to Pendulum 2 and the Variable to
sys_pendu_2.
Figure 16.
Click OK.
This will instantiate the definition. Pendulum 2 will appear in your
Project Browser.
Click on Pendulum 2.
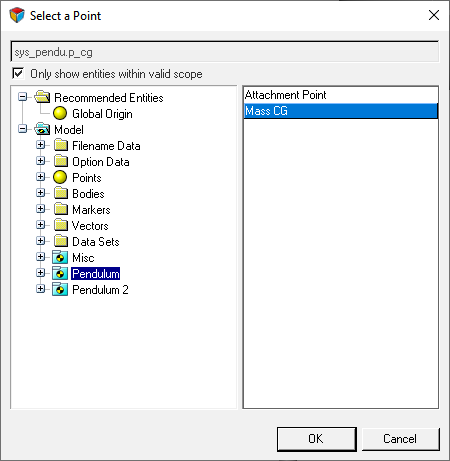
In the Attachments tab, resolve the and attachments.
Double-click the collector.
In the Model Tree, click Pendulum > Mass CG. Then click OK.
Figure 17.
Double-click the collector.
In the Model Tree click Pendulum > Mass. Then click OK.
Save the model
to your <working directory> as
pend_2_gui.mdl.
You can reuse the same system definition to instantiate several times either
within the same model or in a different model.
 (System/Assembly panel) button.
(System/Assembly panel) button. to the model and display the system's
panel.
to the model and display the system's
panel.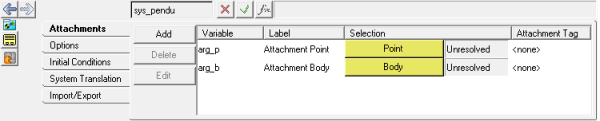 Note: These attachments will be used to attach this system to other model entities. Notice that both are currently Unresolved, meaning they are not yet referring to another entity in the model.
Note: These attachments will be used to attach this system to other model entities. Notice that both are currently Unresolved, meaning they are not yet referring to another entity in the model. collector.
collector.

 collector.
collector.
 (Points) icon.
(Points) icon.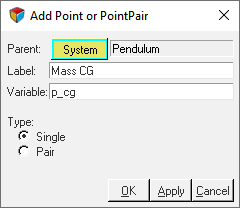
 button.
This will display the Expression Builder.
button.
This will display the Expression Builder.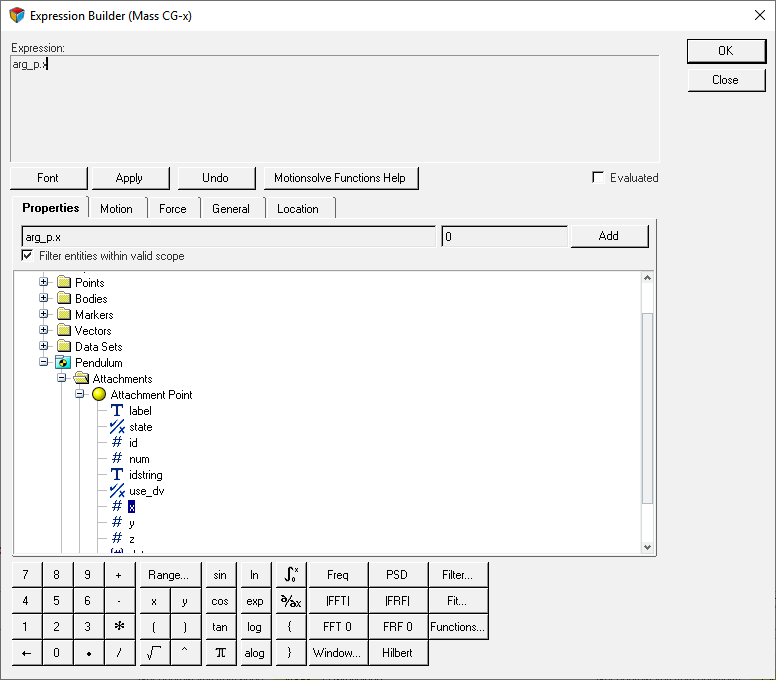 The expression arg_p.x will automatically fill the Expression area.
The expression arg_p.x will automatically fill the Expression area.
 Note: the background color of the field changes for parametric expressions.
Note: the background color of the field changes for parametric expressions. (Bodies) icon.
(Bodies) icon.
 .
.

 (Graphics) icon.
(Graphics) icon. collector.
collector.

 (Joints) icon.
(Joints) icon. .
.
 .
.
 Tip: You can also click the Global Triad and pick Ground Body via the Attachment Body.
Tip: You can also click the Global Triad and pick Ground Body via the Attachment Body. and select Global Y.
and select Global Y.
 (Save model) and save the file as
pend_gui.mdl to your <working
directory>.
(Save model) and save the file as
pend_gui.mdl to your <working
directory>.
 (file browser) and browse to your
<working directory>.
(file browser) and browse to your
<working directory>.