Plotting Contact Forces
The steps to plot the contact force results for the simulation are:
-
Load the desired results file into HyperGraph:
Figure 1.

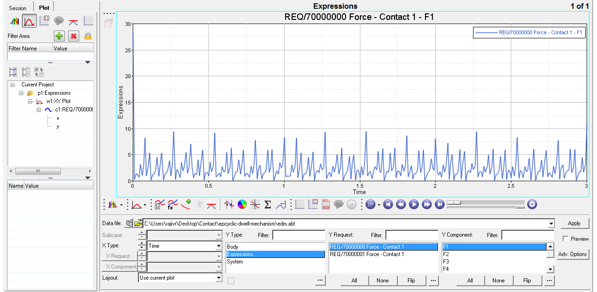
-
Select the Y Type as Expression, the relevant Y Request,
and the Y Component belonging to the contact force:
Figure 2.

-
Click the Apply button.
Figure 3.

-
Inspect the results in the graphics area.
Figure 4.