Add an n-Post Event to a Full Vehicle Model
- Right-click on Model in the Project Browser and select
Add Events from the context menu.
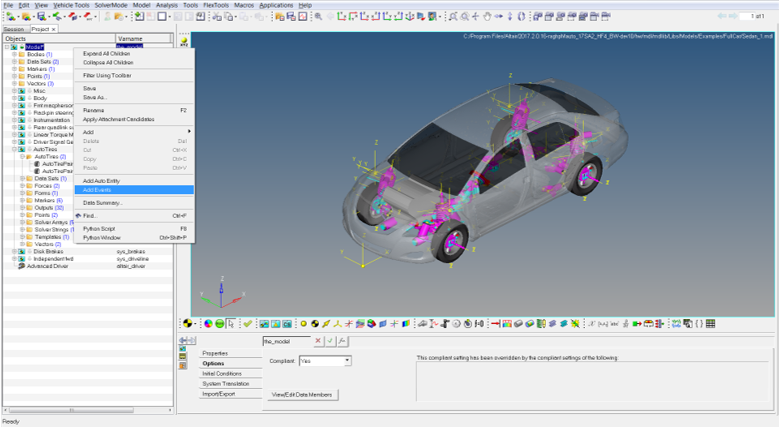
Figure 1. - From the Add Events dialog, select n-PostShaker from the Type
drop-down menu and click Apply.
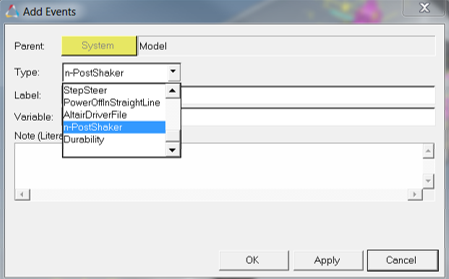
Figure 2.