Constraints
- Three Joints are used to constrain the vehicle when the event is simulated.
- Perpendicular Axes Joint between the Vehicle body and ground body. This is a static simulation constraint, which is deactivated during the transient part of the simulation.
- Inline Joint between the Vehicle body and ground body. This is also a static simulation constraint, which is deactivated during the transient part of the simulation.
- The Steering Wheel Joint is used to lock the steering wheel motion during the simulation.
- To stop vehicle drift, there is an option to add a Vehicle Restraint, which can be a Bushing or a Fixed Joint. When the None option is selected, the vehicle will not be constrained. The Bushing option has user-editable properties.
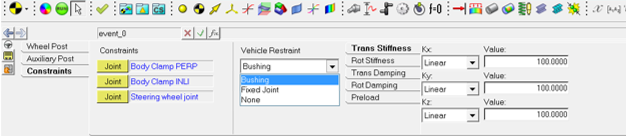
Figure 1. Constraints Tab Functions and Options
Attention: Once the posts are set up, you can click the ‘Assign
Signals’ button to add signals to each post.