/PROP/TYPE25 (SPR_AXI)
Block Format Keyword This property set is used to define the axisymmetric spring property set.
Description
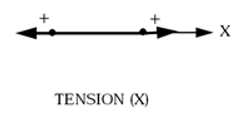 Figure 1. Tension/Compression |
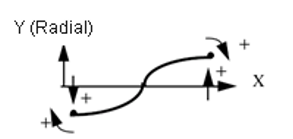 Figure 2. Shear (Radial) |
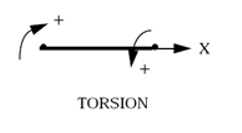 Figure 3. Torsion |
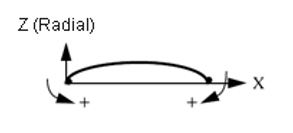 Figure 4. Bend (Radial) |
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Mass | Inertia | Skew_ID | sens_ID | Isflag | Ifail | Ileng | Ifail2 | ||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K1 | C1 | A1 | B1 | D1 | |||||
| fct_ID11 | H1 | fct_ID21 | fct_ID31 | F1 | |||||
| Ascale1 | E1 | fct_ID41 | Hscale1 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K2 | C2 | A2 | B2 | D2 | |||||
| fct_ID12 | H2 | fct_ID22 | fct_ID32 | F2 | |||||
| Ascale2 | E2 | fct_ID42 | Hscale2 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K3 | C3 | A3 | B3 | D3 | |||||
| fct_ID13 | H3 | fct_ID23 | fct_ID33 | F3 | |||||
| Ascale3 | E3 | fct_ID43 | Hscale3 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K4 | C4 | A4 | B4 | D4 | |||||
| fct_ID14 | H4 | fct_ID24 | fct_ID34 | F4 | |||||
| Ascale4 | E4 | fct_ID44 | Hscale4 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | n1 | ||||||||
| C2 | n2 | ||||||||
| C3 | n3 | ||||||||
| C4 | n4 | ||||||||
Definitions
| Field | Contents | SI Unit Example |
|---|---|---|
| prop_ID | Property
identifier (Integer, maximum 10 digits) |
|
| unit_ID | Unit Identifier (Integer, maximum 10 digits) |
|
| prop_title | Property
title (Character, maximum 100 characters) |
|
| Mass | Spring
mass (Real) |
|
| Inertia | Spring
inertia (Real) |
|
| Skew_ID | Skew system
identifier (Integer) |
|
| sens_ID | Sensor
identifier (Integer) |
|
| Isflag | Sensor flag.
(Integer) |
|
| Ifail | Failure criteria.
(Integer) |
|
| Ileng | Input per unit length
flag.
(Integer) |
|
| Ifail2 | Failure model flag.
(Integer) |
|
| K1 | Stiffness for
tension (Real) |
|
| C1 | Damping for
tension (Real) |
|
| A1 | Coefficient for strain
rate effect in tension (homogeneous to a force). Default = 1.0 (Real) |
|
| B1 | Logarithmic coefficient
for strain rate effect in tension (homogeneous to a
force). (Real) |
|
| D1 | Scale coefficients for
elongation velocity. Default = 1.0 (Real) |
|
| fct_ID11 | Function identifier
defining
.
If H1 =4: Upper yield curve function identifier (Integer) |
|
| H1 | Hardening flag.
(Integer) |
|
| fct_ID21 | Function identifier
defining
. (Integer) |
|
| fct_ID31 | Function used only for
unloading. If H1=4: Function identifier defining lower yield curve. If H1=5: Function identifier defining residual displacement vs maximum displacement. If H1=6: Function identifier defining nonlinear unloading curve. If H1=7: Function identifier defining nonlinear unloading curve. (Integer) |
|
| fct_ID41 | Function identifier
defining
. (Integer) |
|
| Hscale1 | Coefficient for
(homogeneous to a force). Default = 1 (Real) |
|
| F1 | Scale factor for
in function
. (Real) |
|
| Negative failure
limit. Default = -1030 (Real) |
||
| Positive failure
limit. Default = 1030 (Real) |
||
| Ascale1 | Abscissa scale factor for
(fct_ID11 and fct_ID31). (Real) |
|
| E1 | Coefficient for strain
rate in tension (homogeneous to a force). (Real) |
|
| K3 | Stiffness for
torsion. (Real) |
|
| C3 | Damping for
torsion. (Real) |
|
| A3 | Coefficient for strain
rate effect in torsion (homogeneous to a moment). Default = 1.0 (Real) |
|
| B3 | Logarithmic coefficient
for strain rate effect in torsion (homogeneous to a
moment). (Real) |
|
| D3 | Scale coefficients for
torsion velocity. Default = 1.0 (Real) |
|
| fct_ID13 | Function identifier
defining
.
If H3=4: Function identifier defining upper yield curve (Integer) |
|
| H3 | Hardening flag.
(Integer) |
|
| fct_ID23 | Function identifier
defining
. (Integer) |
|
| fct_ID33 | Function used only for
unloading. If H3=4: Function identifier defining lower yield curve. If H3=5: Function identifier defining residual displacement vs maximum displacement. If H3=6: Function identifier defining nonlinear unloading curve. If H3=7: Function identifier defining nonlinear unloading curve. (Integer) |
|
| fct_ID43 | Function identifier
defining
. (Integer) |
|
| Hscale3 | Coefficient for
(homogeneous to a force). Default = 1 (Real) |
|
| F3 | Scale factor for
in function
. (Real) |
|
| Negative failure
limit. Default = -1030 (Real) |
||
| Positive failure
limit. Default = 1030 (Real) |
||
| Ascale3 | Abscissa scale factor for
(fct_ID13 and fct_ID33). (Real) |
|
| E3 | Coefficient for strain
rate effects in torsion (homogeneous to a
moment). (Real) |
|
| K2 | Stiffness for
shear. (Real) |
|
| C2 | Damping for
shear. (Real) |
|
| A2 | Coefficient for strain
rate effect in shear (homogeneous to a force). Default = 1.0 (Real) |
|
| B2 | Logarithmic coefficient
for strain rate effect in shear (homogeneous to a force). Default = 1.0 (Real) |
|
| D2 | Scale coefficients for
shear velocity. Default = 1.0 (Real) |
|
| fct_ID12 | Function identifier
defining
.
If H2=4: Function identifier defining upper yield curve (Integer) |
|
| H2 | Hardening flag.
(Integer) |
|
| fct_ID22 | Function identifier
defining
. (Integer) |
|
| fct_ID32 | Function used only for
unloading
. If H2=4: Function identifier defining lower yield curve. If H2=5: Function identifier defining residual displacement vs maximum displacement. If H2=6: Function identifier defining nonlinear unloading curve. If H2=7: Function identifier defining nonlinear unloading curve. (Integer) |
|
| fct_ID42 | Function identifier
defining
. (Integer) |
|
| Hscale2 | Coefficient for
(homogeneous to a force). Default = 1 (Real) |
|
| F2 | Scale factor for
in function
. (Real) |
|
| Negative failure
limit. Default = -1030 (Real) |
||
| Positive failure
limit. Default = 1030 (Real) |
||
| E2 | Coefficient for strain
rate effect in shear (homogeneous to a force). (Real) |
|
| Ascale2 | Abscissa scale factor for
(fct_ID12 and fct_ID32). (Real) |
|
| K4 | Stiffness for
bending. (Real) |
|
| C4 | Damping for
bending. (Real) |
|
| A4 | Coefficient for strain
rate effect in bending (homogeneous to a moment). Default = 1.0 (Real) |
|
| B4 | Logarithmic coefficient
for strain rate effect in bending (homogeneous to a
moment). Default = 1.0 (Real) |
|
| D4 | Scale coefficients for
bending velocity. Default = 1.0 (Real) |
|
| fct_ID14 | Function identifier
defining
.
If H4=4: Function identifier defining upper yield curve. (Integer) |
|
| H4 | Hardening flag.
(Integer) |
|
| fct_ID24 | Function identifier
defining
. (Integer) |
|
| fct_ID34 | Function used only for
unloading. If H4=4: Function identifier defining lower yield curve. If H4=5: Function identifier defining residual displacement vs maximum displacement. If H4=6: Function identifier defining nonlinear unloading curve. If H4=7: Function identifier defining nonlinear unloading curve. (Integer) |
|
| fct_ID44 | Function identifier
defining
. (Integer) |
|
| Hscale4 | Coefficient for
(homogeneous to a force). Default = 1 (Real) |
|
| F4 | Scale factor for
in function
. (Real) |
|
| Negative failure
limit. Default = -1030 (Real) |
||
| Positive failure
limit. Default = 1030 (Real) |
||
| Ascale4 | Abscissa scale factor for
(fct_ID14 and fct_ID34). (Real) |
|
| E4 | Coefficient for strain
rate effect in bending (homogeneous to a
force). (Real) |
|
| Reference translational
velocity. Default = 1.0 (Real) |
||
| Reference rotational
velocity. Default = 1.0 (Real) |
||
| C1 | Relative velocity
coefficient in translation X. Default = 0.0 (Real) |
|
| n1 | Relative velocity exponent
in translation X. Default = 0.0 (Real) |
|
| "Mult" factor in
translation X. Default = 1.0 (Real) |
||
| Exponent in translation
X. Default = 2.0 (Real) |
||
| C2 | Relative velocity
coefficient in shear. Default = 0.0 (Real) |
|
| n2 | Relative velocity exponent
in shear. Default = 0.0 (Real) |
|
| "Mult" factor in
shear. Default = 1.0 (Real) |
||
| Exponent in
shear. Default = 2.0 (Real) |
||
| C3 | Relative velocity
coefficient in torsion X. Default = 0.0 (Real) |
|
| n3 | Relative velocity exponent
in torsion X. Default = 0.0 (Real) |
|
| "Mult" factor in torsion
X. Default = 1.0 (Real) |
||
| Exponent in torsion
X. Default = 2.0 (Real) |
||
| C4 | Relative velocity
coefficient in bending. Default = 0.0 (Real) |
|
| n4 | Relative velocity exponent
in bending. Default = 0.0 (Real) |
|
| "Mult" factor in
bending. Default = 1.0 (Real) |
||
| Exponent in
bending. Default = 2.0 (Real) |
Comments
- The
spring's X direction is defined using nodes N1 and N2 of the spring.
- If the node of the spring N3 is defined, the spring's Y direction is defined
using nodes N1 and N3 of the spring. N3, N2, and N1 should not be in a line.
The Z direction is:
(1) - If node N3 is not defined in the element input, and skew system is defined
in the property input, the Z direction is:
(2) - If neither node N3 nor skew system are defined in input, the Z direction
is:
(3) 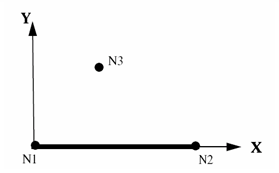
Figure 5. - Finally, Y direction is found as:
(4)
- If the node of the spring N3 is defined, the spring's Y direction is defined
using nodes N1 and N3 of the spring. N3, N2, and N1 should not be in a line.
The Z direction is:
- In case of
Ileng =0, the force in the spring
is computed as:
Linear spring:
with =1, 2
with = 3, 4
Nonlinear spring:
with i= 1, 2
with i= 3, 4
withNote:- Here, (with ) is the difference between the current length and the initial length of the spring element for corresponding translational DOF.
- is the relative angle for corresponding rotational DOF in radians.
- For linear springs, , and , , and are null functions and Ai, Bi, Ei, and Hscalei are not taken into account.
- If stiffness function (or ) is requested, then K is used as a slope for unloading only.
- If K is lower than the maximum slope of function (or ) (K is not consistent with the maximum slope of the curve), K is set to the maximum slope of the curve.
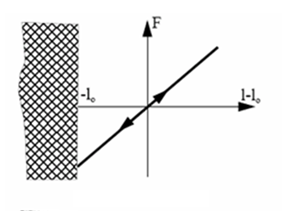
Figure 6. Linear Spring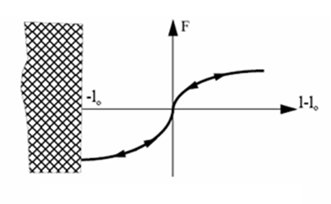
Figure 7. Nonlinear Elastic Spring, Hi=0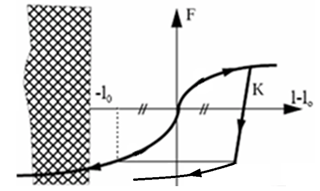
Figure 8. Nonlinear Elastic Plastic Spring, Hi=1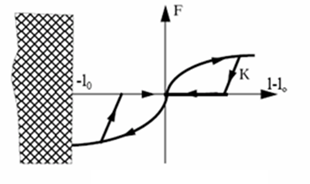
Figure 9. Nonlinear Elasto-Plastic Spring with Decoupling Hardening in Tension and Compression, Hi=2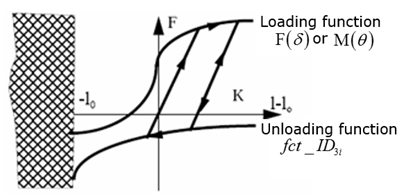
Figure 10. Nonlinear Elastic Plastic Spring 'kinematic' Hardening, Hi=4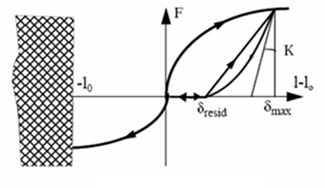
Figure 11. Nonlinear Elasto-Plastic Spring with Nonlinear Unloading, Hi=5
Figure 12. Nonlinear Elasto-Plastic Spring with Isotropic Hardening and Nonlinear Unloading, Hi=6
Figure 13. Nonlinear Spring with Elastic Hystersis, Hi=7 - If Ileng = 1, all input are per
unit length:
- Spring mass =
Spring stiffness =
Spring damping =
Spring inertia =
Where, is the reference spring length.
- The force in the spring is computed as:
Linear spring:
with =1, 2
with =3, 4
Nonlinear spring:
with =1, 2
with =3, 4
Where, is the engineering strain and defined as:(5) Force functions are given versus engineering strain and engineering strain rate.
Failure criteria are defined with respect to strain. Input negative/positive failure limit should be related to initial length
- Spring mass =
Spring stiffness =
Spring damping =
Spring inertia =
- If hardening flag is 4, hardening is kinematic. Lower and upper yield curves are the same.
- If hardening flag is 5,
residual deformation is a function of maximum displacement:
with =1,2
with =3,4
- The decoupled hardening (hardening flag Hi=2) and kinematic hardening (hardening flag Hi=4) models are only valid in axial direction (tension and torsion). They are not available in radial direction (shear and bending).
- Failure criteria:
- If the failure criteria are uni-directional Ifail=0, the spring fails
as soon as one of the criteria is met in one direction:
or , with and being the failure limits in direction =1, 2
or , with and being the failure limits in direction =3, 4
For each direction (or ) should be negative and (or ) should be positive. If the values are zero, then no failure will be taken into account.
- If the failure criteria is multi-directional Ifail=1, the spring fails
when the following criteria is fulfilled:
(6) For "old" displacement formulation (Ifail =0), the coefficients and i are equal to 1.0 and 2.0, respectively.
New formulation ( Ifail2 > 0) allows to model velocity dependent failure limit for translational DOF:(7) Where, or is the static failure limit in translational directions (Lines 5 and 8), and is the reference velocity.
- Force and energy criteria are activated with
Ifail2=2 or
3:
(8) In this case the displacement values are replaced by positive failure force or failure energy values.
New formulation (Ifail2 =1) allows you to model velocity dependent failure limit for rotational DOF:(9) Where, or is the static failure limit in rotational direction (Lines 11 and 14), and 0 is the reference velocity.
Moment and energy criteria are activated with Ifail2=2 or 3:(10) In this case the rotation values are replaced by positive failure moment or failure energy values.
- If the failure criteria are uni-directional Ifail=0, the spring fails
as soon as one of the criteria is met in one direction:
- Spring
activated and/or deactivated by sensor:
- If sens_ID ≠ 0 and Isflag = 0, the spring element is activated by the sens_ID.
- If sens_ID ≠ 0 and Isflag = 1, the spring element is deactivated by the sens_ID.
- Spring elements with sensor activation or deactivation are mainly used for the pretension model.
- If a sensor is used for activating or deactivating a spring, the reference length of the spring at sensor activation (or deactivation) is equal to the nodal distance at time =0.